

Three-wheeled smart car Raspberry pie Slam ROS lidar two wheel differential robot chassis for educational
- Категория: Robotic Kits >>>
- Поставщик: Guangzhou,Emulation,Robot,Co.,Ltd.
Поделиться:
Описание и отзывы
Трекер стоимости
| Месяц | Минимальная цена | Макс. стоимость |
|---|---|---|
| Sep-18-2025 | 0.64 $* | 0.56 $* |
| Aug-18-2025 | 0.56 $* | 0.29 $* |
| Jul-18-2025 | 0.55 $* | 0.87 $* |
| Jun-18-2025 | 0.44 $* | 0.8 $* |
| May-18-2025 | 0.54 $* | 0.84 $* |
| Apr-18-2025 | 0.61 $* | 0.41 $* |
| Mar-18-2025 | 0.93 $* | 0.15 $* |
| Feb-18-2025 | 0.82 $* | 0.6 $* |
| Jan-18-2025 | 0.43 $* | 0.8 $* |
Характеристики
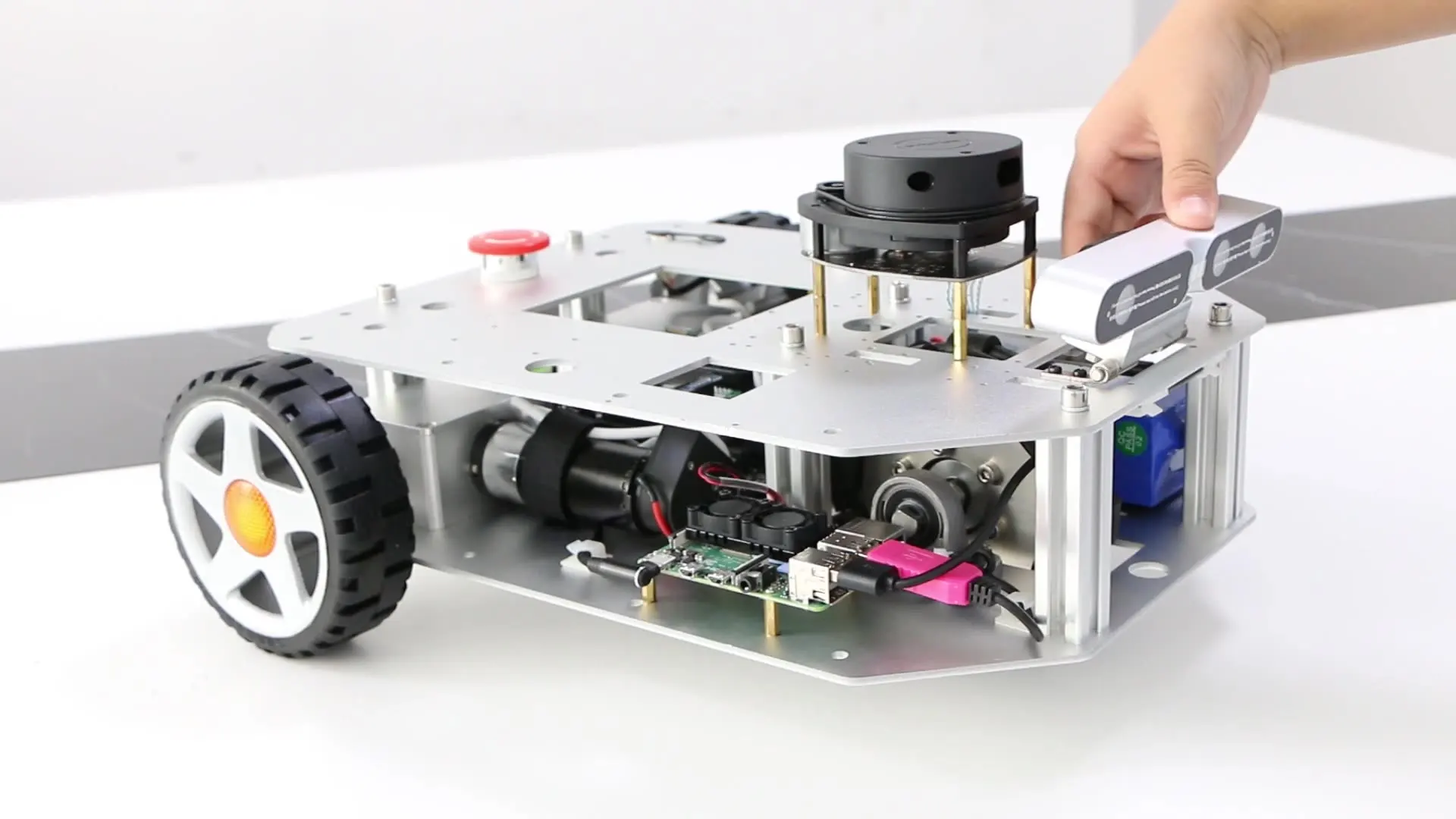
Three-wheeled smart car Raspberry pie Slam ROS lidar two wheel differential robot chassis for educational kit
Slam ROS lidar of two wheel differential robot chassis Silan A1 raspberry pie navigation obstacle avoidance










Serial port: The mobile platform can receive commands from the serial port or send its own
Data (odometer and IMU
USB interface: used to connect to the computer, download the program with one key and receive the command control sent by the computer
And send its own data (odometer and MU) to the serial port.
BB wif): can send its own information to APP, can receive APP remote control commands, and can adjust
Section PID parameters.
PS2 interface: Provide PS2 handle socket, provide code plug and play.
SWD interface: provide SWD interface for online debugging
Open source and algorithm description
Provide the complete source code of the mobile platform and the schematic diagram of the controller. MOS driver module not provided
Schematic diagram, but a detailed manual is provided. Provide detailed communication protocol and developer hands for the interface
Book. In addition, there are PID development notes and video tutorials.
The mobile platform is mainly to solve the problem of "making wheels" in everyone's projects. Built-in PID closed loop
Control and kinematics analysis, can receive commands from serial port and CAN or even notebook.
Optional ROS package with ROS master control, lidar, and depth camera
ROS main control: Raspberry Pi 4B (2G+32G) or Jetson Nano BO1, Jetson TX2, industrial computer, etc. optional
Operating system: ubuntu18.04+ ROS melodic
Lidar: Silan RPLIDAR A1 or A2 is optional (for higher-end A3, S1 and other radars, please contact customer service)
Camera: Astra Pr depth camera
Functions: remote control, lidar mapping and navigation, visual mapping and navigation, multi-point cruise, lidar follow,
In-depth visual following, visual line patrol, APP image transmission, etc.
Open source: open source a full set of underlying code, ROS source code, development manual
Camera angle can be adjusted manually
Rtabmap vision and lidar mapping navigation
Supports visual SLAM, mapping, hector., karto, Google Cartographer and other algorithms to build maps














Похожие товары