




Роботизированный силовой привод для роботизированного рычага
- Категория: Speed Reducers >>>
- Поставщик: Zhengzhou,Defy,Mechanical,&,Electrical,Equipment,Co.,Ltd.
Поделиться:
Описание и отзывы
Трекер стоимости
| Месяц | Минимальная цена | Макс. стоимость |
|---|---|---|
| Sep-17-2025 | 0.86 $* | 0.50 $* |
| Aug-17-2025 | 0.62 $* | 0.66 $* |
| Jul-17-2025 | 0.42 $* | 0.77 $* |
| Jun-17-2025 | 0.47 $* | 0.35 $* |
| May-17-2025 | 0.54 $* | 0.61 $* |
| Apr-17-2025 | 0.39 $* | 0.58 $* |
| Mar-17-2025 | 0.80 $* | 0.79 $* |
| Feb-17-2025 | 0.44 $* | 0.94 $* |
| Jan-17-2025 | 0.15 $* | 0.56 $* |
Характеристики
Robot Joint Actuator for jointed arm robot eRob142
Product Description
eRob Robot Joint Module.Robot Joint

Product Features
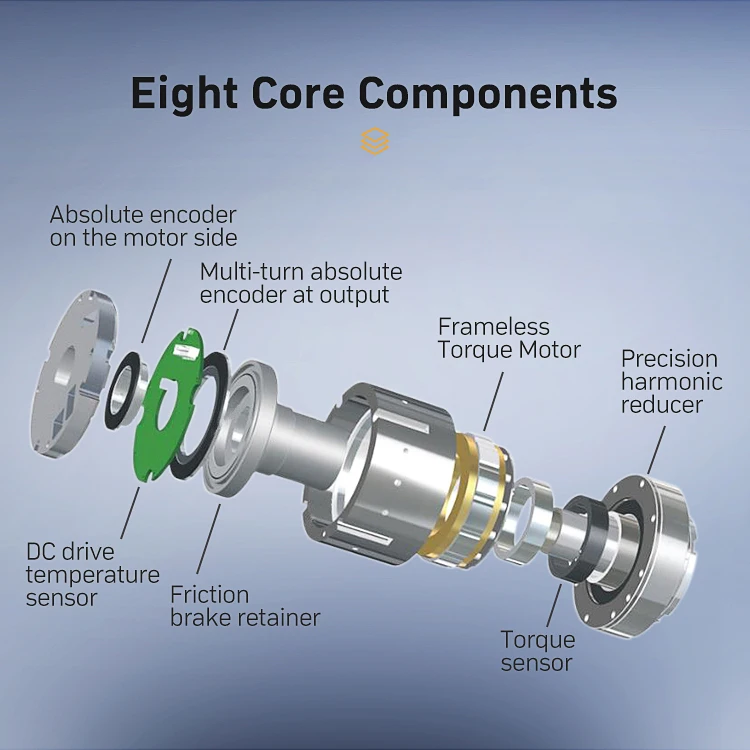
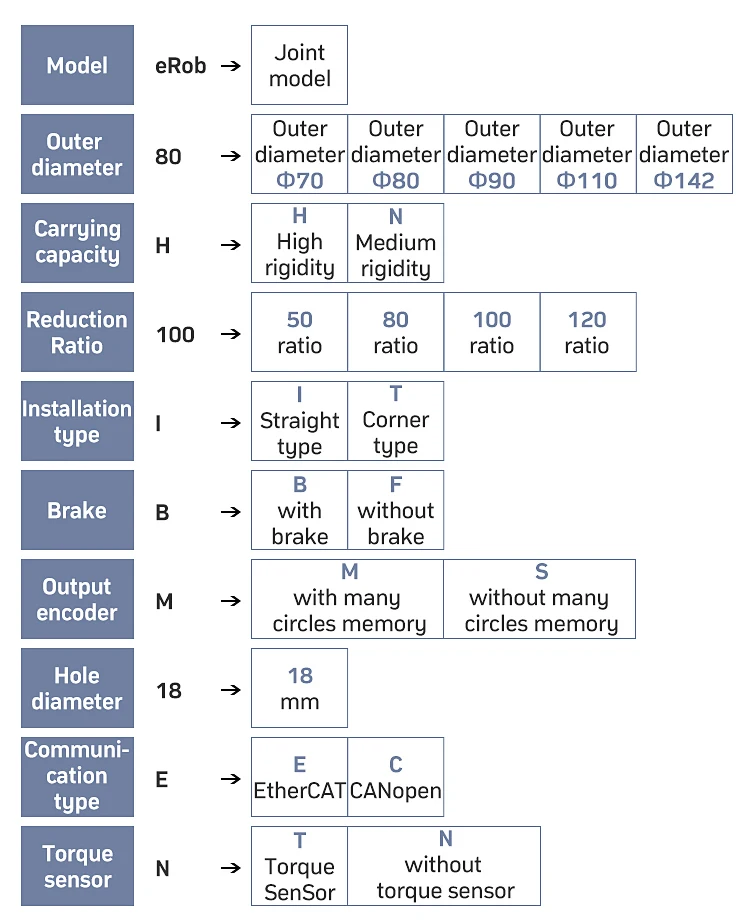
This eRob series robot joint modules include eRob70, eRob80, eRob90, eRob110, eRob142, etc., with exquisite design and compact structure. The compact size includes servo drivers, motor side absolute value encoder, output side absolute value encoder, and frameless torque motors, brakes, precision harmonic reducers and other main components, which save customers hundreds of mechanical and electronic components selection, design, procurement, assembly labor and time costs.Robot Joint

This series robot joint module includes Eight core components as below, motor end absolute value encoder, multi-turn absolute encoder at output, Frameless Torque Motor, precise harmonic reducer,Torque sensor, friction brake retainer and DC drive temperature sensor.
Motor Robot Joint eRob701 has an outer diameter of only 70mm, a height of 81mm and a through-hole of 18mm.980g super light weight, torque deadweight ratio up to 50N-m/kg.

Motor Robot Joint eRob series robot joint modules include eRob70, eRob80, eRob90, eRob110, eRob142, etc.

This series robot joint modules support multiple communication protocols.
With EtherCAT, CANopen communication, open position loop, speed loop, current loop data and PID real-time adjustment, suitable for dynamic load and variable inertia robot applications.

This series robot joint modules built-in dual absolute value encoder, full closed loop control
19-bit absolute encoder at the output, repeat positioning accuracy up to ±10 arc seconds, absolute positioning accuracy up to ±45 arc seconds, single-turn and multi-turn power-off positions can be memorized, fully closed-loop control, no wear accuracy.Robot Joint



Product Parameter

| Model | eRob70 | eRob80 | eRob90 | |||||
| Harmonic reducer-ratio | 14-50 | 14-80 | 14-100 | 17-50 | 17-80 | 17-100 | 20-80 | 20-100 |
| Start-stop peak torque(N.m) | 18/23 | 23/30 | 28/36 | 34/44 | 43/56 | 54/70 | 74/96 | 82/107 |
| Rated torque(N.m) | 5.4/7 | 7.8/10 | 7.8/10 | 16/21 | 22/29 | 24/31 | 34/44 | 40/52 |
| Momentary allowable maximum torque(N.m) | 35/46 | 47/61 | 54/70 | 70/91 | 87/113 | 110/143 | 127/165 | 147/191 |
| Peak speed of output(RPM) | 60 | 37.5 | 30 | 60 | 37.5 | 30 | 37.5 | 30 |
| Motor power(W) | 100 | 200 | 400 | |||||
| Supply voltage(V) | 48(±10%) | |||||||
| Rated current(A) | 3.3 | 6.9 | 11 | |||||
| Peak current(A) | 11 | 16.8 | 29 | |||||
| Output encoder resolution | 19Bit Robot Joint | |||||||
| Repeat/absolute positioning accuracy | ±10/45Arcsec | |||||||
| Communication bus | EtherCAT/CANopen | |||||||
| Outer diameter x length x through hole(mm) | 70*81*18 | 80*95*18 | 90*102*18 | |||||
| Weight(KG) | 0.98 | 1.4 | 2.1 | |||||
| Interface design | Fully differential interface design, strong anti-interference ability; double sets of anti-loose plugs, can be connected in series | |||||||
| Brake | Friction damping brake | |||||||
| IP level | IP54 | |||||||
| Model | eRob110 | eRob142 | ||
| Harmonic reducer-ratio | 25-100 | 25-120 | 32-100 | 32-120 |
| Start-stop peak torque(N.m) | 157/204 | 167/217 | 333/433 | 353/459 |
| Rated torque(N.m) | 67/87 | 67/87 | 137/178 | 137/178 |
| Momentary allowable maximum torque(N.m) | 284/369 | 304/395 | 647/841 | 686/892 |
| Peak speed of output(RPM) | 20 | 16.7 | 20 | 16.7 |
| Motor power(W) | 750 | 1000 | ||
| Supply voltage(V) | 48(±10%) | |||
| Rated current(A) | 20 | 26 | ||
| Peak current(A) | 40 | 56 | ||
| Output encoder resolution | 19Bit | |||
| Repeat/absolute positioning accuracy | ±10/45Arcsec | |||
| Communication bus | EtherCAT/CANopen | |||
| Outer diameter x length x through hole(mm) | 110*127*18 | 142*137*18 | ||
| Weight(KG) | 3.3 | 6.7 | ||
| Interface design | Fully differential interface design, strong anti-interference ability; double sets of anti-loose plugs, can be connected in series | |||
| Brake | Friction damping brake | |||
| IP level | IP54 Robot Joint | |||
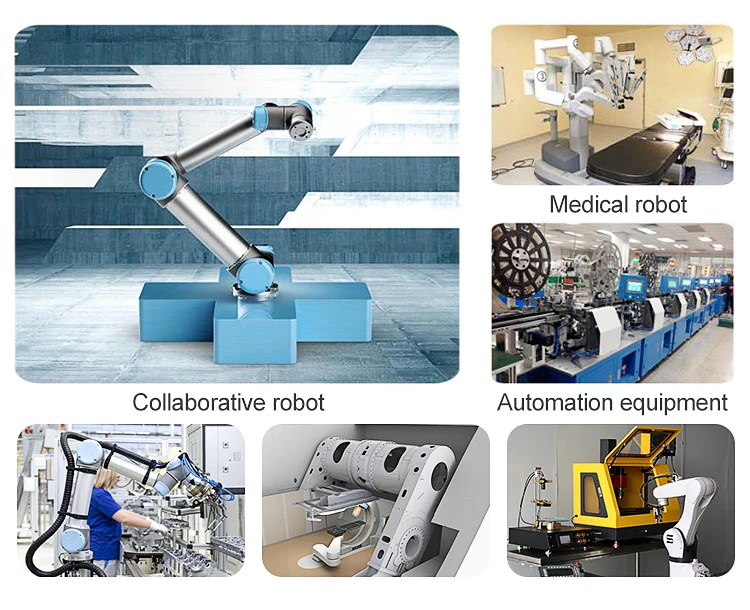
Application
This series Robot Joint Modules are mainly used for Collaborative robot, medical robot and other automation equipment.Robot Joint
Shipping list
Shipping list of this series robot joint modules include
1pcs joint module,
2pcs 48V power connector(2pin),
2pcs CANopen connector &wiring,
2pcs EtherCAT connector&wiring(4 pin) and
1pcs I/O connector &wiring(12pin).Robot Joint

Our Services
1. We accept small order of Joint module;
2. Sample order of Joint module delivery time is in 9 days, mass quantity order lead time is 9-15 days;
3. We can accept payment via paypal, T/T and L/C;
4.Quality assurance of our Joint module is 1 year, and we can provide you professional technical support;
5. We provide free software wand training how to use the products. Engineers are available for technical support.Robot Joint
FAQ
Q: Are you trading company or manufacturer?
A: We are manufacturer and trading company.
Q: Can I have a sample order?
A: Yes, we welcome sample order to test and check quality.
Q: How long is your delivery time?
A: Due to the complex process, production takes 8-10 working days. For customized goods, please check with us before order.
Q. How do you ship the goods and how long does it take to arrive?
A: Usually by express, like DHL, UPS, FedEx, EMS or TNT; By air and sea are also available.
Express takes 3-15 days to arrive.
Q: What is your terms of payment?
A: We accept Trade Assurance Order, TT, Paypal, West Union and L/C.Robot Joint






