frp высокое напряжение ружье палки
US $0.01-$0.50



Поделиться:
| Месяц | Минимальная цена | Макс. стоимость |
|---|---|---|
| Sep-17-2025 | 0.75 $* | 0.25 $* |
| Aug-17-2025 | 0.18 $* | 0.41 $* |
| Jul-17-2025 | 0.51 $* | 0.16 $* |
| Jun-17-2025 | 0.97 $* | 0.77 $* |
| May-17-2025 | 0.75 $* | 0.13 $* |
| Apr-17-2025 | 0.14 $* | 0.82 $* |
| Mar-17-2025 | 0.77 $* | 0.35 $* |
| Feb-17-2025 | 0.0 $* | 0.70 $* |
| Jan-17-2025 | 0.10 $* | 0.30 $* |
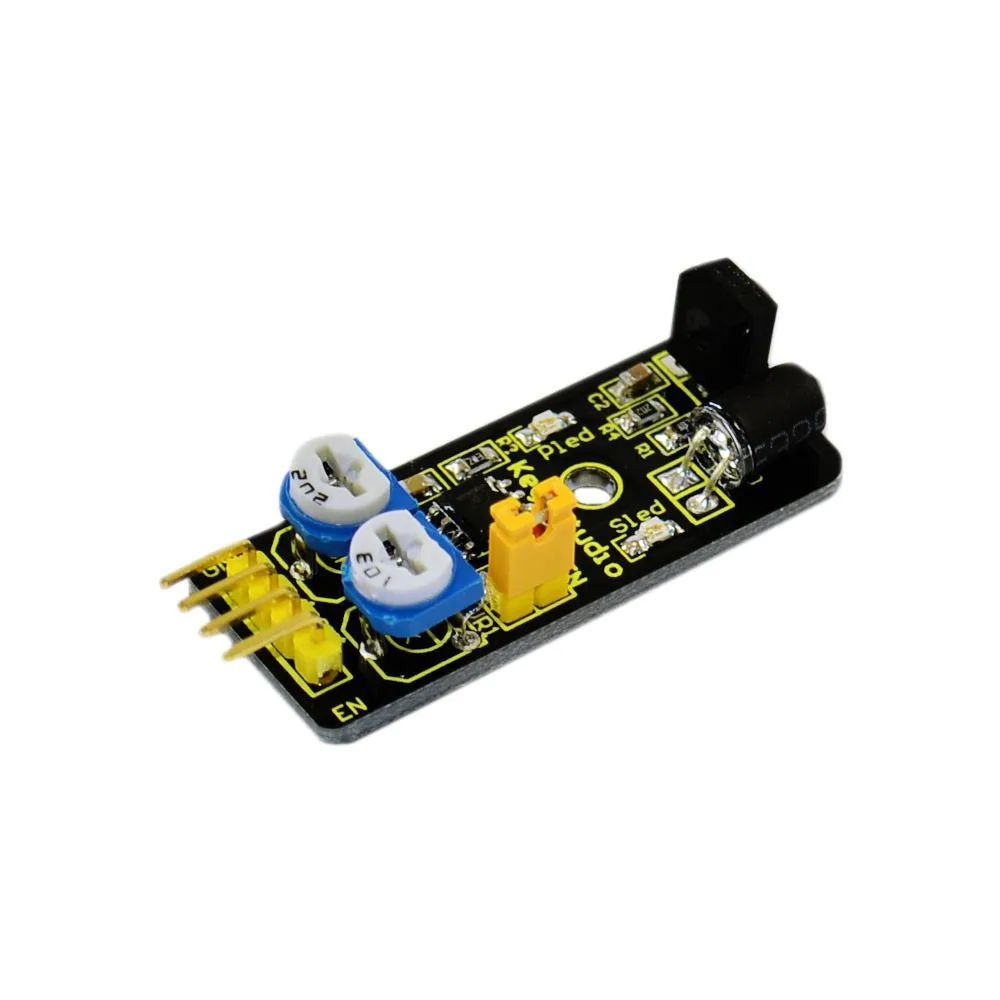
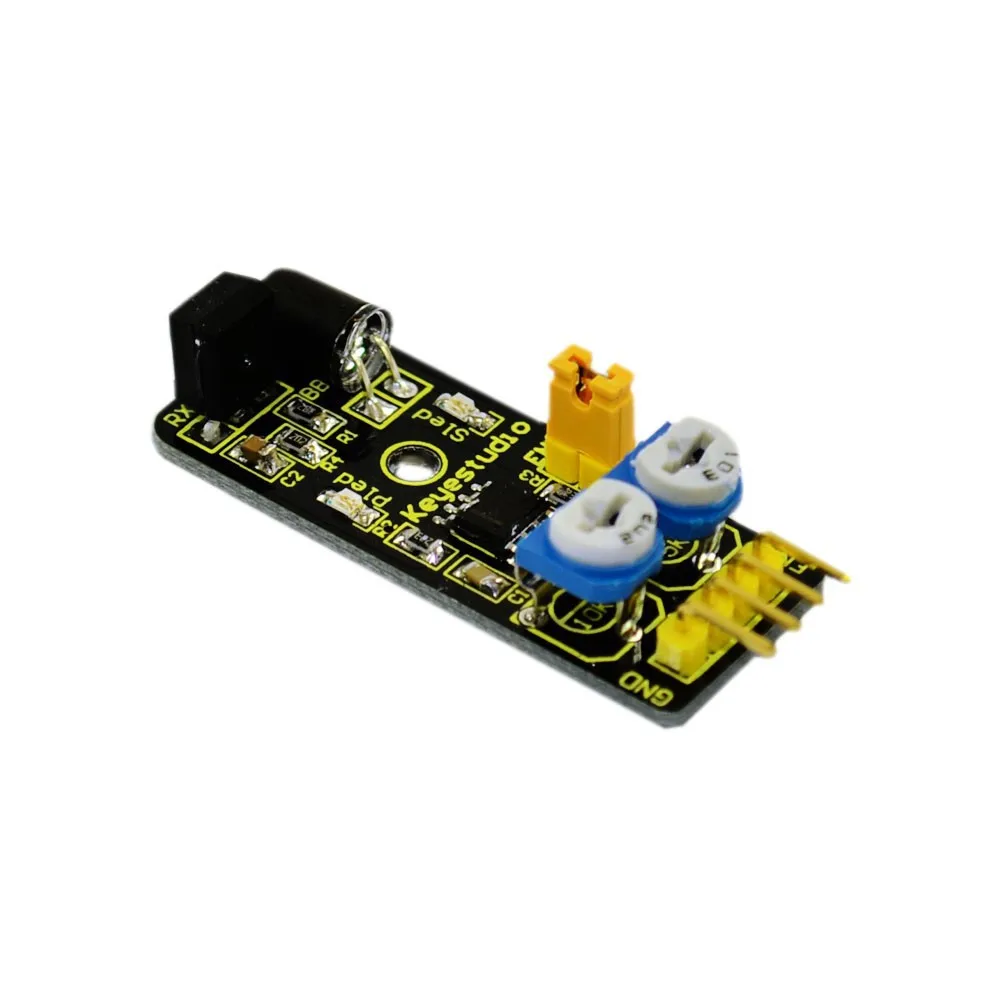
Введение:
Инфракрасный датчик избегание препятствий оснащен расстояние функция регулировки и специально разработана для колесных роботов. Этот датчик сильного приспособляемость к освещенности и высокой точности. Он имеет пару инфракрасного передачи и приема трубки. Когда инфракрасных лучей запущен передачи трубки встречается препятствие (ее рефлектор) и инфракрасных лучей отражен к получения трубки, индикатор загорится; интерфейс выходной сигнал выхода цифрового сигнала. Мы можете регулировать расстояние обнаружения через ручки потенциометра (эффективное расстояние: 2 ~ 40 см, рабочее напряжение: 3.3 В-5 В). Благодаря широкий диапазон напряжения, этот датчик может работать стабильно даже при колебаниях напряжения питания и подходит для использования различных микро -контроллеров, arduino контроллеров и BS2 контроллеров. Робот установлен с датчик может изменения в смысле окружающей среды.
Пример кода:
/Набор номера контактов:
СопзЬ int sensorpin = 2;/номер датчика pin
СопзЬ int ledpin = 13;/количество светодиодов pin
/Переменных изменится:
INT sensorstate = 0;/Переменная для чтения Статус сенсора
Недействительными установки () {
/Инициализации Светодиод Pin как выходной:
PinMode (ledpin, выход);
/Инициализации Кнопка Pin как Входной:
PinMode (sensorpin, input);
}
Недействительными петля () {
/Узнать состояние датчик значение:
Sensorstate = digitalread (sensorpin);
/Если это, sensorstate высока:
Если (sensorstate = высокий) {
/Включите LED:
DigitalWrite (ledpin, high);
}
Еще {
/Включить led off:
DigitalWrite (ledpin, низкая);
}
}
Данные ресурс не является интернет-магазином, а лишь содержит ссылки на международную торговую площадку Alibaba.com